This page describes some of the representative design research, HCI, and IT projects I have either led or co-led in the past. The projects listed here range from extensive, multi-year, sponsored research projects, to projects that took from several months to a year to complete.
1. DBL SmartCity ProjectPermalink
The following figure shows a screenshot of the experimental web client prototype, developed for the DBL SmartCity project at Georgia Tech. It features a streaming 3D geometry view at the top (showing 3D models of buildings, terrain, and annotation data), as well as six views showing various scalar data (temperature, counts, alerts) pertaining to the selected 3D object.
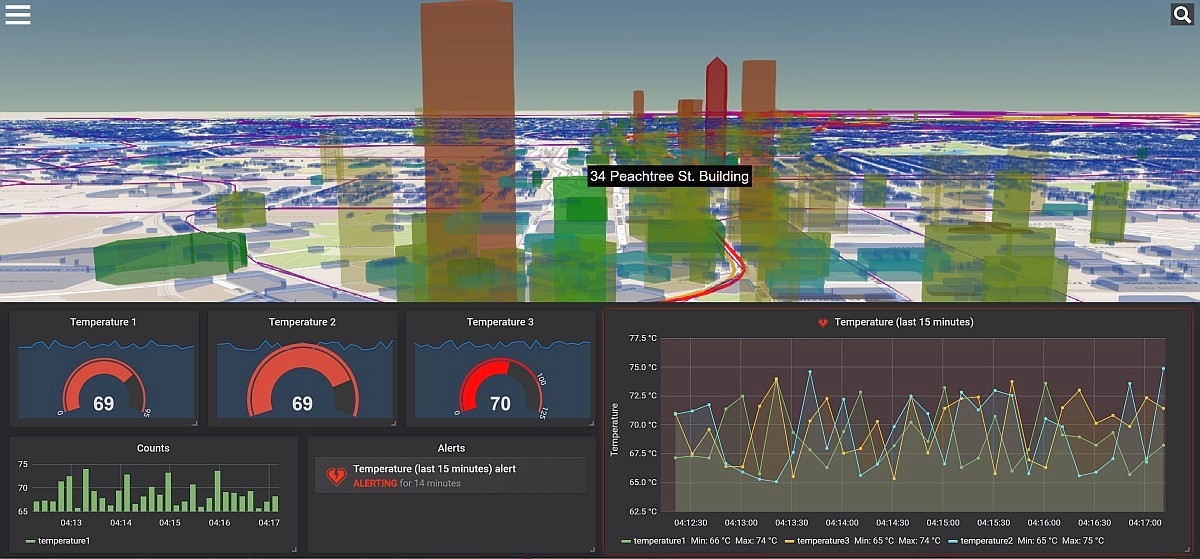 The experimental DBL SmartCity web client (dark mode).
The experimental DBL SmartCity web client (dark mode).
Disciplines that were relevant for this project included HCI (human-computer interaction), IxD (interaction design), UX (user experience), systems engineering, system architecture, and cloud computing, as well as Big Data, Smart City, and Digital Twin paradigms.
S. Kolarić, D. Shelden (2019) DBL SmartCity: An Open-Source IoT Platform for Managing Large BIM and 3D Geo-Referenced Datasets, Proceedings of the 52nd Hawaii International Conference on System Sciences (HICSS-52), Grand Wailea, Maui, HI. https://doi.org/10.24251/HICSS.2019.238
2. CAMBRIA ProjectPermalink
The CAMBRIA project produced a series of interaction design artifacts related to the class of “multi-state” parametric CAD tools. In other words, tools that support working with multiple parametric design models in parallel.
Early-Stage SketchingPermalink
The figure below shows an example of ideation having been done by manually sketching possible approaches to interaction in CAMBRIA, by using markers on a whiteboard. Using this technique, the overall goal was to determine basic mechanisms through which, by combining different parts of certain artefacts (for example, bicycles, wheelbarrows, …), one could come up with a multitude of different yet related designs.
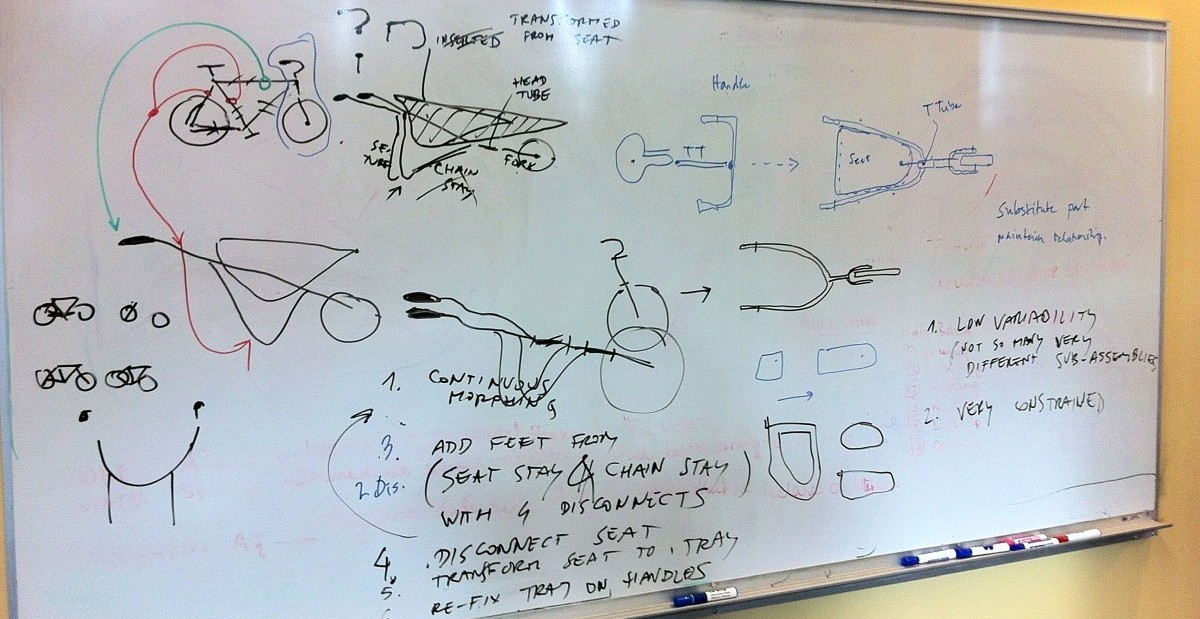 Early-stage interaction sketches: parallel editing of analogous parts for two different yet related designs: a bicycle design, and a wheelbarrow design.
Early-stage interaction sketches: parallel editing of analogous parts for two different yet related designs: a bicycle design, and a wheelbarrow design.
Early-Stage StoryboardingPermalink
The figure below shows a storyboard developed for CAMBRIA, in order to further explore the space of possible design solutions.
 Early-stage storyboard for CAMBRIA.
Early-stage storyboard for CAMBRIA.
PrototypesPermalink
The following figure shows the main interface of a higher-fidelity CAMBRIA protoype.
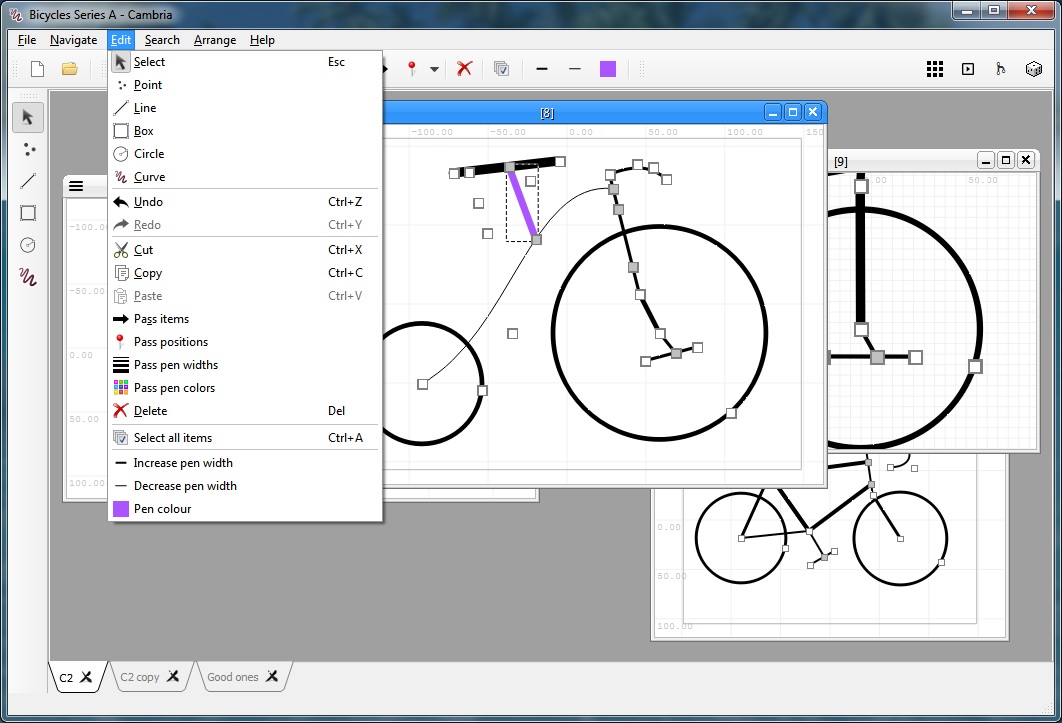 Screenshot of the CAMBRIA prototype (main interface).
Screenshot of the CAMBRIA prototype (main interface).
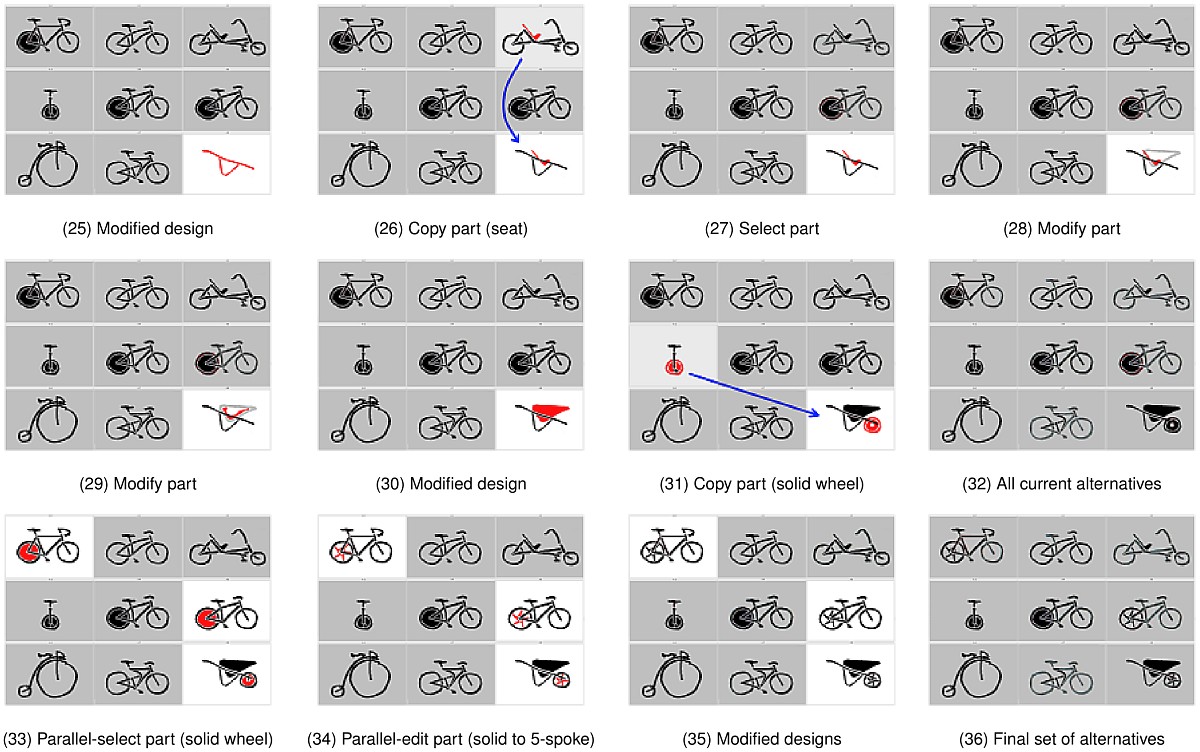
The following screenshot shows CAMBRIA with four different “arrangements” of alternatives: (1) grid, (2) slideshow, (3) design history, and (4) “random” arrangements.
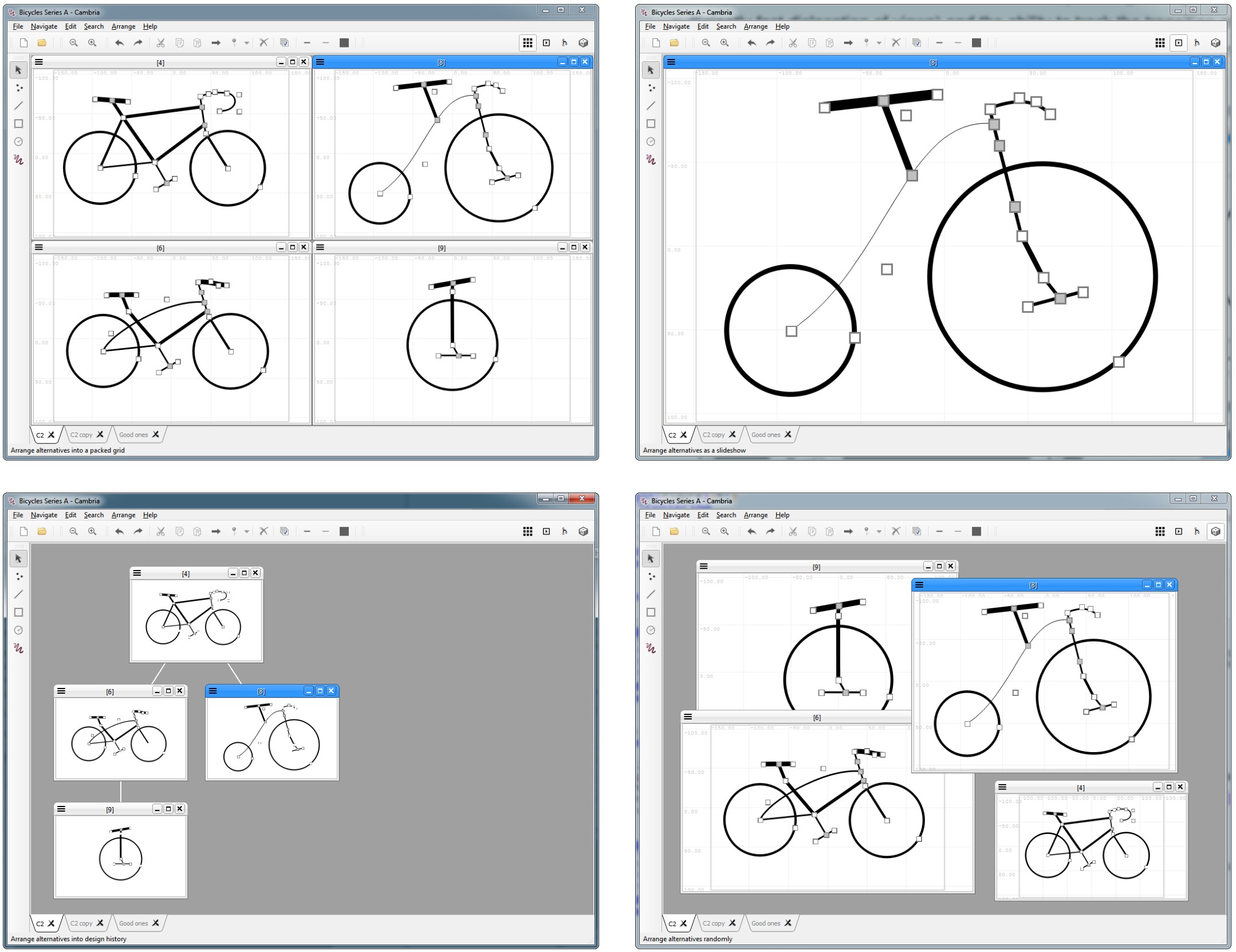 CAMBRIA prototype showing four parallel parametric design models, and four different arrangements.
CAMBRIA prototype showing four parallel parametric design models, and four different arrangements.
Evaluation StudiesPermalink
CAMBRIA was evaluated in two major studies, one qualitative (formative, “think-aloud” evaluation), and one analytical.
“Think-aloud” evaluation. In the first study, six renowned HCI experts were recruited for a formative evaluation, with the main purpose being to obtain a high-level, qualitative feedback on the prototype. The experts were encouraged to “think aloud” as they explored and interacted with the prototype.
Analytical evaluation. In the second study, the prototype was evaluated using an analytical method based on the Cognitive Dimensions (CD) framework by Blackwell and others. For each of the dimensions (visibility, juxtaposability, hidden dependencies, error-proneness, and abstraction gradient), CAMBRIA was assigned a descriptive score such as “good”, “adequate”, or “low”.
A representative conference paper on CAMBRIA:
S. Kolarić, H. Erhan, R. Woodbury (2017) CAMBRIA: Interacting with Multiple CAD Alternatives. In: Çağdaş G., Özkar M., Gül L., Gürer E. (eds) Computer-Aided Architectural Design. Future Trajectories. CAADFutures 2017. Communications in Computer and Information Science, vol 724. Springer, Singapore. https://doi.org/10.1007/978-981-10-5197-5_5
3. “Comprehending CAD Models” ProjectPermalink
In this study, I developed and experimentally evaluated two GUI prototypes (named “split” and “integrated”) in the domain of parametric CAD modeling. Participants in the study (n = 13) were asked to perform a number of 3D model comprehension tasks, using both interfaces. The goal of the study was to determine which of these two interfaces led to a better comprehension of the 3D model, when rendered using the wireframe visualization mode.
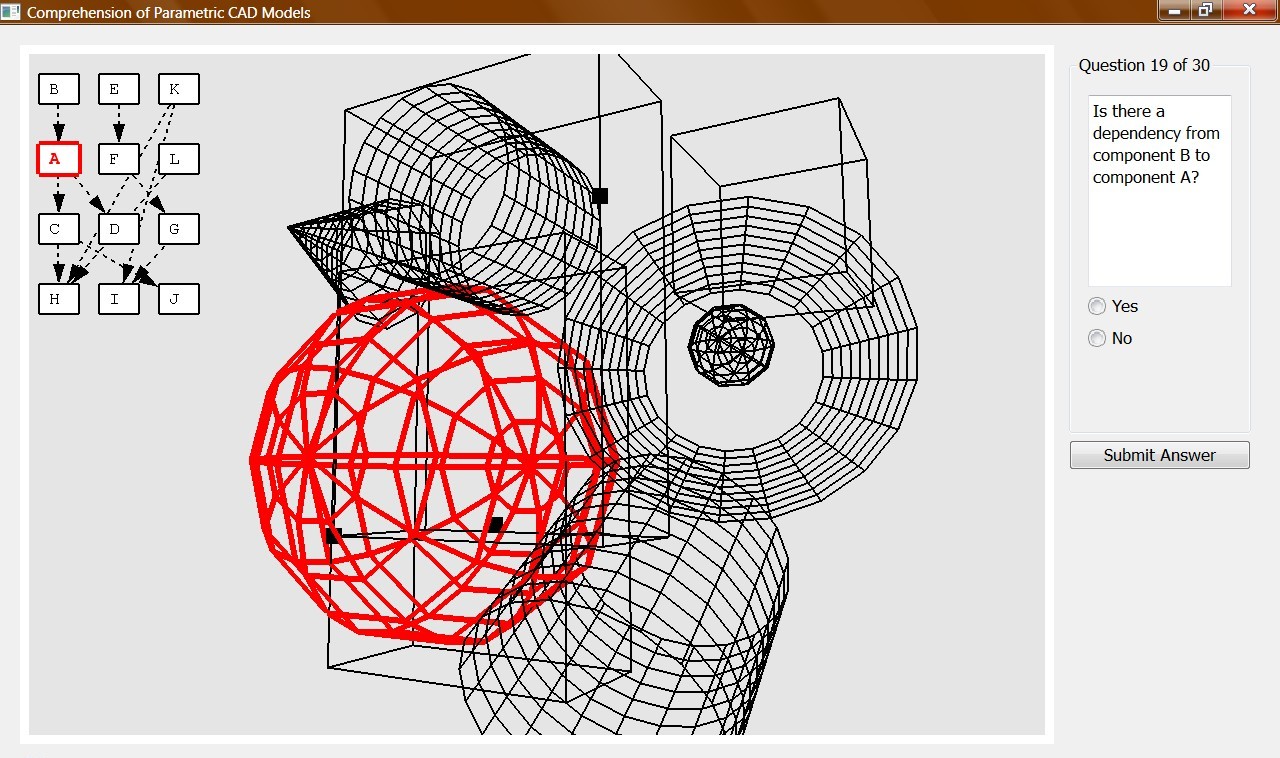
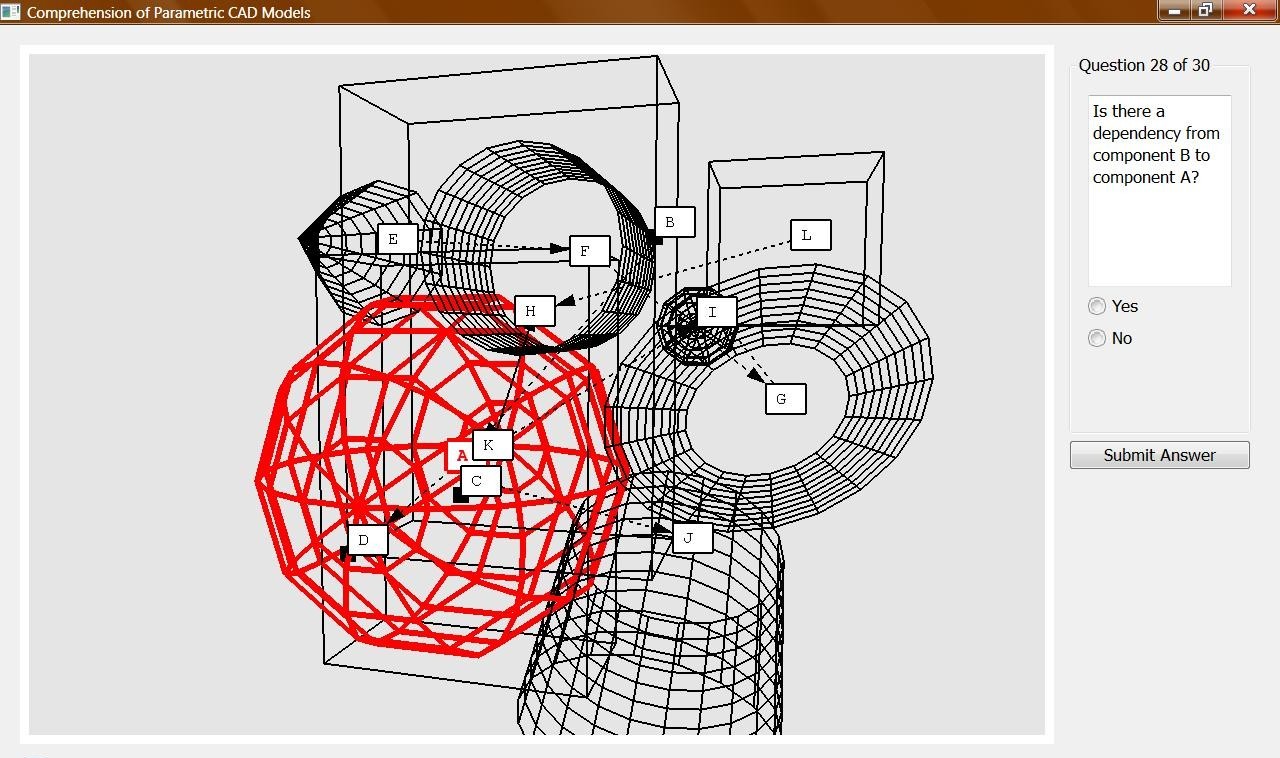
The “split” interface prototype developed for this study consisted of the dependency graph and its associated diagram showing geometric parts, placed side-by-side.
The “integrated” interface prototype developed for this study consisted of one topo-geometric diagram that combines elements from the “split” interface into one unified interface.
Evaluation Study (Quantitative)Permalink
The metrics measured in this study were the task completion times, error rates, and user satisfaction for both interfaces.
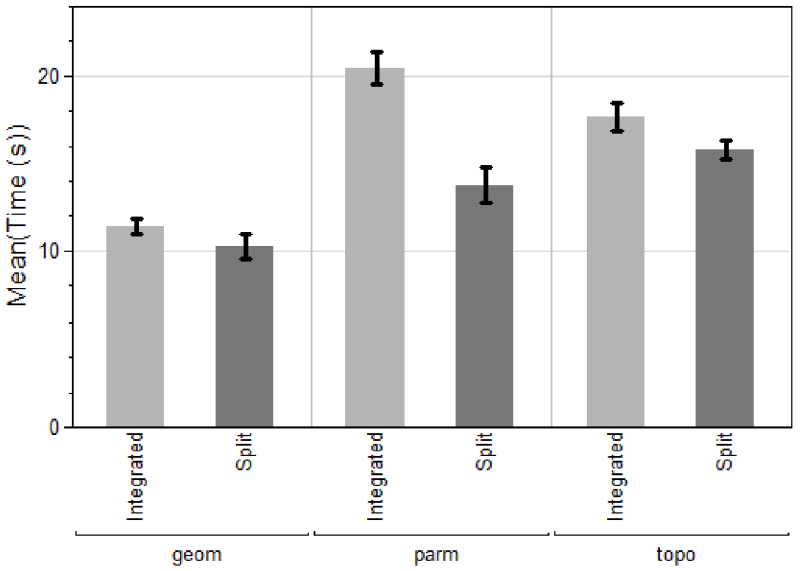 Mean task completion times, grouped by both interface type and task type.
Mean task completion times, grouped by both interface type and task type.
The figure above provides an example of the dependent (observed) variables observed in this study, in this case the mean task completion times.
S. Kolarić, H. Erhan, B. Riecke, R. Woodbury: Comprehending Parametric CAD Models: An Evaluation of Two Graphical User Interfaces, short paper, Proceedings of the 6th Nordic Conference on Human-Computer Interaction (NordiCHI 2010), Reykjavik, Iceland, p.707-710 (2010). https://doi.org/10.1145/1868914.1869010
4. “Vision-Based 3D Manipulation” ProjectPermalink
This project was concerned with developing a prototype of an interactive Mixed Reality application for direct spatial manipulation, based on the vision-based recognition of uninstrumented hands. The prototype dynamically integrated both of the user’s hands into the virtual 3D/4D environment, effectively creating a logical 2 × 3 DoF manipulation device. In conjuction with hand gestures, this afforded a number of fundamental 3D manipulation operations like select, deselect, translate, rotate, and scale.
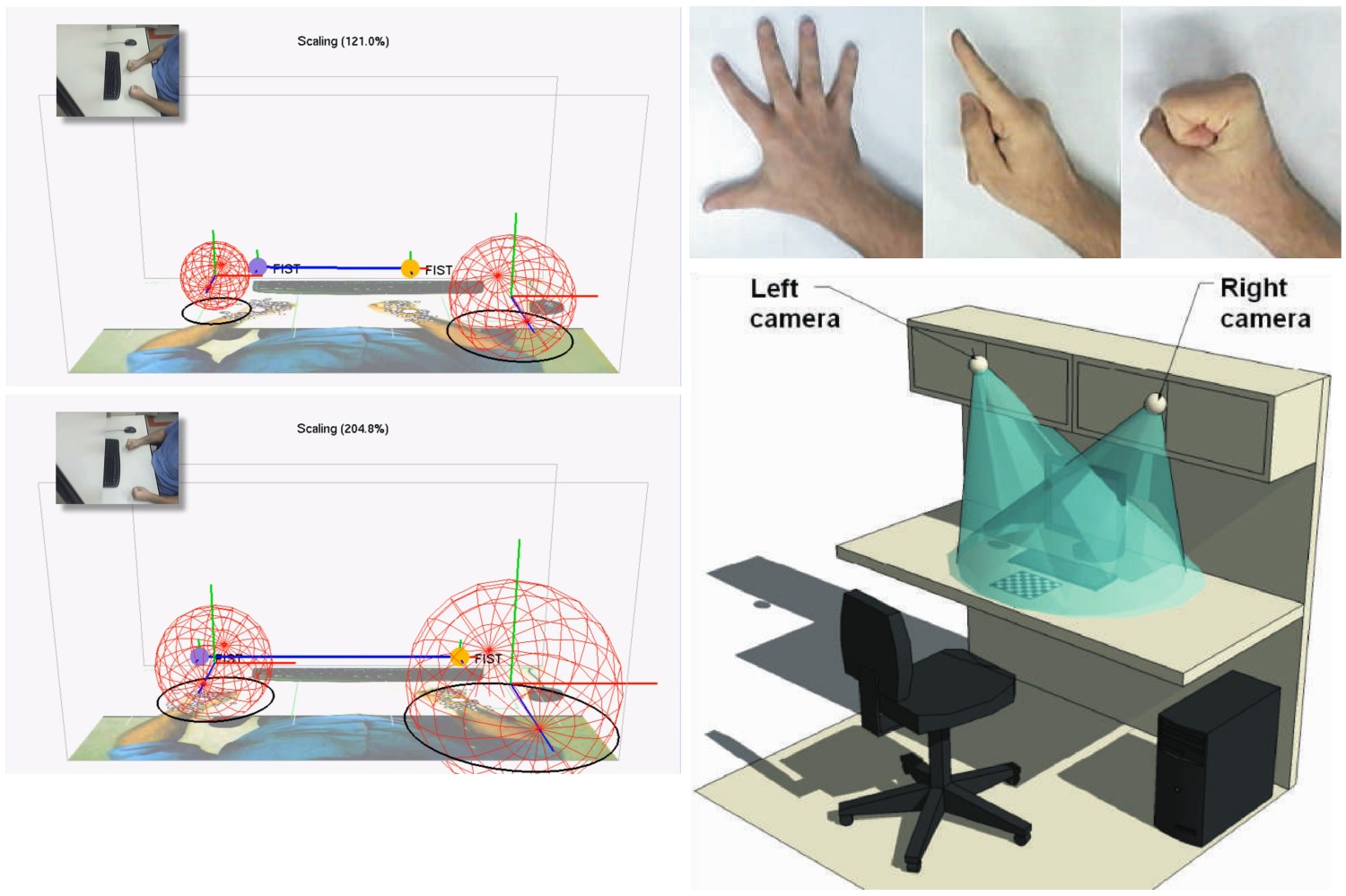 Direct 3D manipulation using vision-based recognition of uninstrumented hands.
Direct 3D manipulation using vision-based recognition of uninstrumented hands.
Evaluation Study (Quantitative)Permalink
Using the system described, I measured tracking-related latencies from 7 to 30ms with just one hand tracked (i.e. with two trackers active), and up to 60ms with both hands tracked (i.e. with all four trackers active). Interaction frame rates ranged from 8 to 15 fps (frames per second).
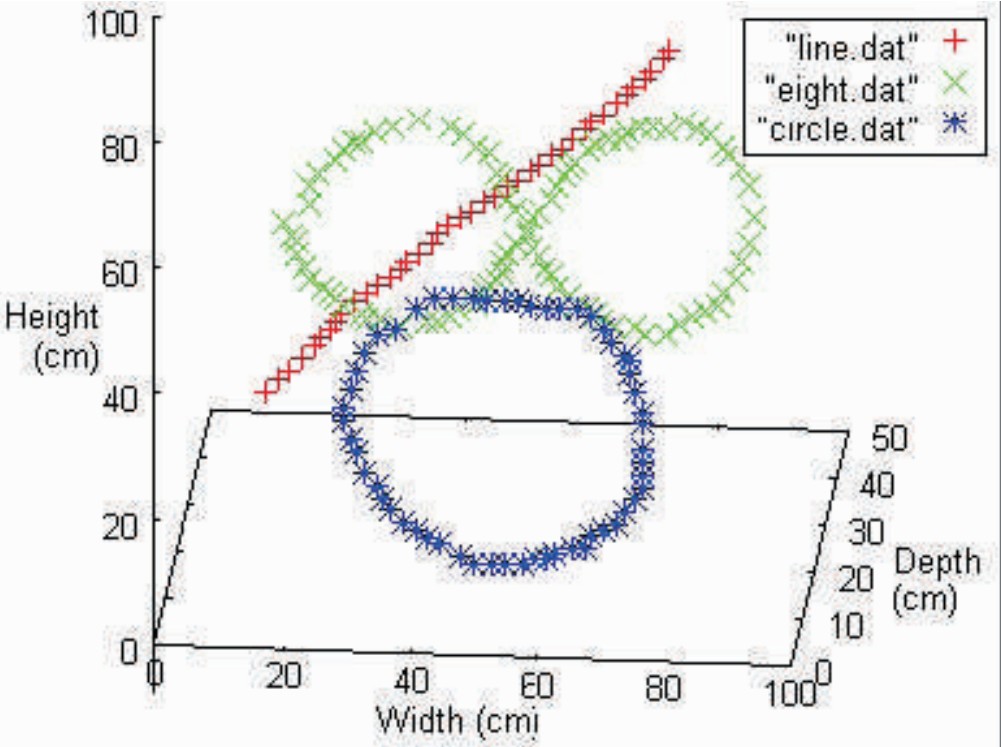 Three-dimensional plot of estimated hand positions, obtained by tracing a line, a circle, and the figure "eight" in space.
Three-dimensional plot of estimated hand positions, obtained by tracing a line, a circle, and the figure "eight" in space.
I also quantitatively assessed estimation accuracy for a hand’s position, as shown in the figure above, from which one can visually deduce the amount of noise present in tracked positions.
S. Kolarić, A. Raposo, M. Gattass: Direct 3D Manipulation Using Vision-Based Recognition of Uninstrumented Hands, full paper, X Symposium on Virtual and Augmented Reality (SVR 2008), Conference Proceedings, João Pessoa, PB, Brazil, p.212-220 (2008). download at CiteSeerX
Next section: Publications